That Conference 2016 - How'd it go?
(TL;DR - Another year of awesome)
What'd we do?
Last year was my first opportunity to officially present alongside my eldest son Christopher. Christopher had been helping with the Lab / Camp the previous two years, and he was interested in taking more responsibility as a co-presenter. Together we presented That Robotics / IoT Lab 2016 both Tuesday and Wednesday afternoons. Building on the previous two years experience, we were able to bring some of the same materials and created a number of new activities for the geeklings to enjoy.
 Ben & Christopher
Ben & ChristopherAmong the projects the Geekling attendees enjoyed were:
- VexIQ Mini-Kits (Racer, Cycle, Duck Explorer and Plane)
- VexIQ Sensor Lab (utilizing Robot-C Graphical / Classic)
- Drivable / Programmable VexIQ Omni-Vehicle
- That Pi Hunt (utilizing Raspberry Pi / Bluetooth Beacons)
- Arduino Bot
- ESP8266 Sensor Projects (via Feather Huzzah and Sparkfun ThingDev)
I'll talk a bit about the various projects, what went well, what didn't and what we'd likely improve if we have the chance to do it all again this year.
VexIQ Kits / Sensor Lab
In 2016, we had 4 kits the kids could put together, complete with a printed booklet (think LEGO instructions). We had an opportunity to re-use a couple of the kits from 2015, and Christopher and Zac (my younger son) came up with a couple new options. We had a few of each kit, and as in previous years, these were a major hit. The kit creation process allowed both Christopher and Zac to experience the engineering design process, from basic line drawings and brainstorming, through design review, initial construction and digitization (via SnapCAD and Adobe InDesign). Once the instructions first draft was completed, the boys assembled the bots to prove it actually worked and correct any part / direction flaws / gaps.
The 4 kits we brought to camp were the Racer, Cycle, Duck Explorer and Plane. The kits were (mostly) easy to follow and the Geeklings could work with their parents (or other Geeklings) to complete assembly. The first 3 kits (Racer, Cycle and Duck) were all relatively similar in complexity, and could be completed in less than 45 minutes. I felt that the plane kit was a bit of an experiment. The model was more advanced than any of the previous models we had tried, and required a significant amount of time to assemble [average was about 2 hours]. I was impressed that 3 different groups completely finished the project, and 1 more got most of the way through before we ran out of time.
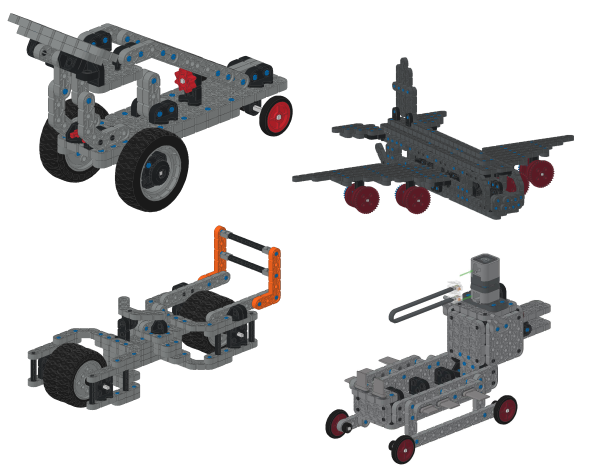 Vex Kits
Vex Kits Completed Plane
Completed PlaneThe sensor lab was also a big hit. We had assembled a number of 'sensor plates', essentially a 12x12 Vex IQ Plate, with a brain, controller, motor and all the sensor types we had available (Color, Distance, Bumper Switch, Gyro, Touch LED). We had a 'wall of laptops' that attendees could use to program the sensor array, and some pre-built instructions and construction paper cards to work with the color sensor and Touch LED. There were numerous geeklings who went above and beyond, working with Graphical RobotC to manipulate the sensor input and do lots of cool things. One enterprising family reprogrammed our drivable omni-bot to do a little dance and flash the attached TouchLEDs to make a 'disco bot'. It was truly awesome to see them dig in and take a simple exercise to a whole new level.
 Sensor Kits
Sensor KitsRobot Virtual Worlds / Robot-C
We again leveraged the free 'Summer of Learning' (SoL) licenses that are made available via the Computer Science Student Network (CS2N). Unfortunately, the 2016 licenses ONLY covered virtual robot programming through Robot Virtual Worlds, which limited attendees to only a few laptops that could run 'full' Robot-C and interact with the sensor kits above. Previous SoL licenses had included both the Robot Virtual Worlds and standard Robot-C. I'm hoping that this years entry brings that capability back, as we don't have funding resources to purchase full licenses for all our camp laptops.
The RVW license allowed the geeklings to utilize the Robot-C IDE to walk through some exercises using a virtual robot in pre-defined 'worlds', solving problems and learning a bit about programming robots along the way. The nice part about RVW is that it allows experimentation without needing a physical robot to work with. Last year the geeklings again adventured in 'Expedition Atlantis' (a math problem solving game), explored Palm Island (which we visited a bit in 2014) and delved into the Ruins of Atlantis.
Arduino Bot and ESP8266 Sensor Projects
Entirely new this year were a number of 'Internet of Things' projects that the geeklings could try. The wall of laptops included copies of Arduino Studio. A number of folks had loaned us some sensor and bot hardware, and we wanted to give the kids a chance to explore both hardware and software simultaneously, along with providing some projects that might interest the older geeklings.
Accolade Systems loaned us a couple of their Arduino-based robots to use for the camp, and we borrowed a number of sensors from Skyline that worked with the ESP8266 boards that we had on hand (a Feather Huzzah from Adafruit and a ThingDev from SparkFun).
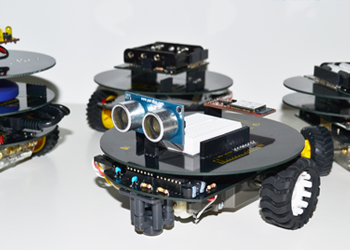 Robotic Shield
Robotic ShieldOn a whole, these projects were underutilized, primarily because Christopher and I just ran out of time to put together guided samples. If we have a chance this year, I think we'll plan to bring more prepared examples to help lower the barrier of entry on these projects. The geeklings seemed to really enjoy putting together hardware and seeing it 'come to life', so I think a bit more guidance here could have made for a very engaging experience for all.
That Pi Hunt
The final project that the kids could participate in was one I had hoped would be a main draws of the IoT Lab. I had spent some time putting together a Windows IoT Core application which could read Bluetooth LE Beacons, light up some LEDs and 'capture' the beacons by wandering throughout the conference center. We had brought some Gimbal Series 10 Beacons and That Conference loaned us some Kontakt.io Smart Beacons which we distributed around the Lab room and in a couple of the conference hallways. Kontakt.io was also generous enough to donate some goodies for the kids to take with them!
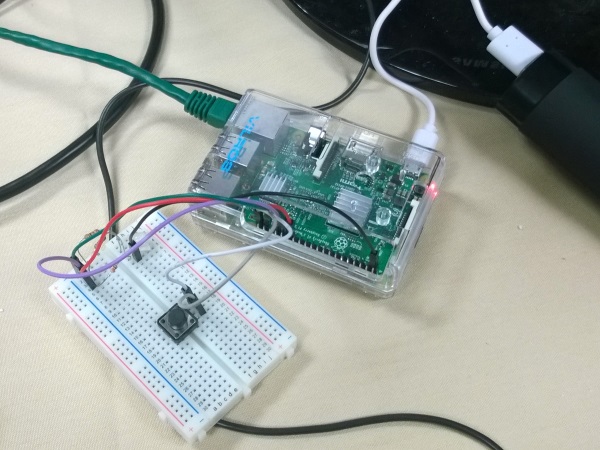 That Pi Hunt Hardware
That Pi Hunt HardwareI plan to do a larger write-up / lessons learned on That Pi Hunt, but the end result was a bit of a mixed bag. I think a combination of environmental, software and hardware problems made the process a bit of a frustration for most who tried it out. However, we learned a lot, both about how exciting playing around with hardware can be, and different approaches we'd take if we had to do it all over again. The kids loved to see the simple hardware they had assembled work with the test application that we developed, and it proved a great way to ensure that they had wired everything correctly.
I plan to continue developing the app to hopefully squash the bugs, and add some additional sensor options to the mix. All the code is available in our GitHub Repo in the 'pihunt' branch. Feel free to pull it down and play around with it.
In Closing
That Conference 2016 and specifically That Robotics / IoT Lab felt like a bit of a whirlwind, but we had a ton of fun. As we do every year, we found some things worked better than others, and we plan to take those learnings and apply them to future presentations. If you had a chance to attend last year, thanks for stopping out, and if not, we hope to see you this year!
All the code and examples we used for the lab are slowly but surely making their way out to GitHub. Some of the code was pulled from other samples available on the internet, and some was created specifically for the lab, but all should be available there, with links to the source material where applicable.
That Robotics / IoT Lab Repository
Thanks again to all who make That Conference possible (organizers, attendees and sponsors)! You've created something great, and we hope to be a part of it for many years to come! Don't forget, the Call for Speakers is coming up Feb 1st, 2017 (through March 15th), so start preparing your abstracts!